About the McGill
Aerospace Mechatronics Lab
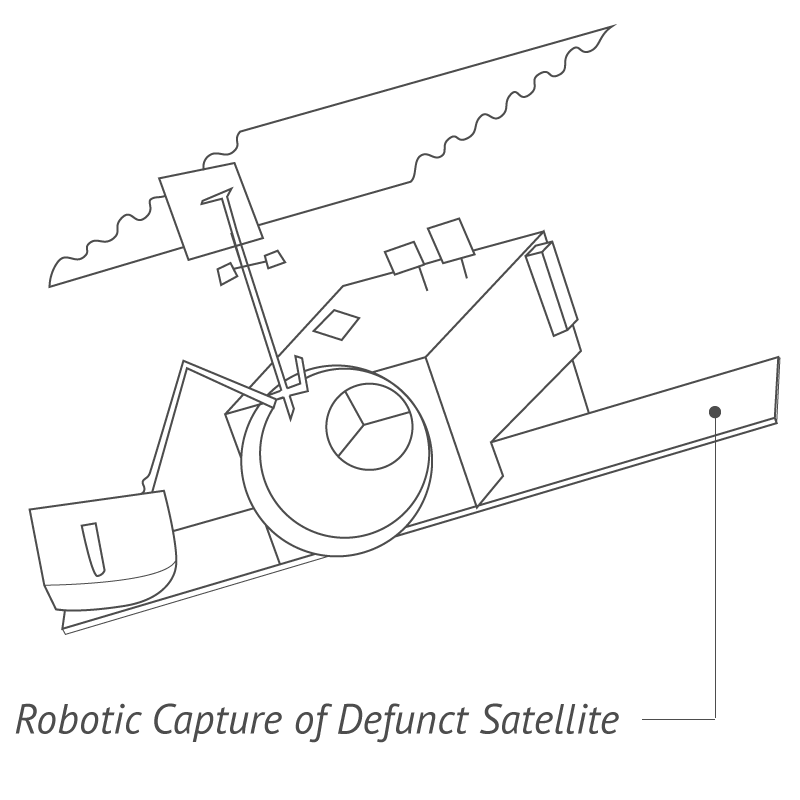
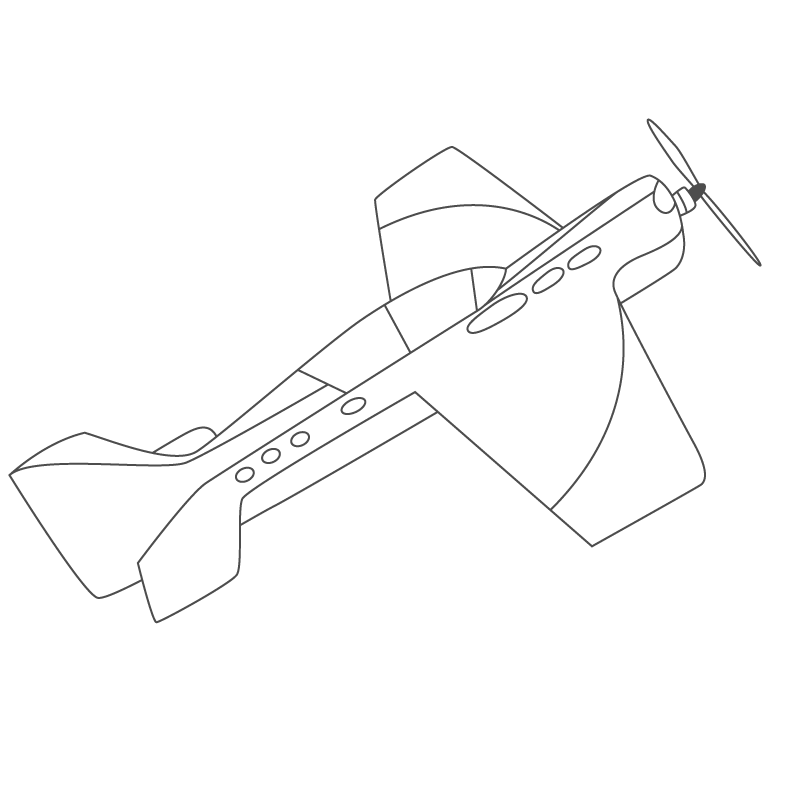
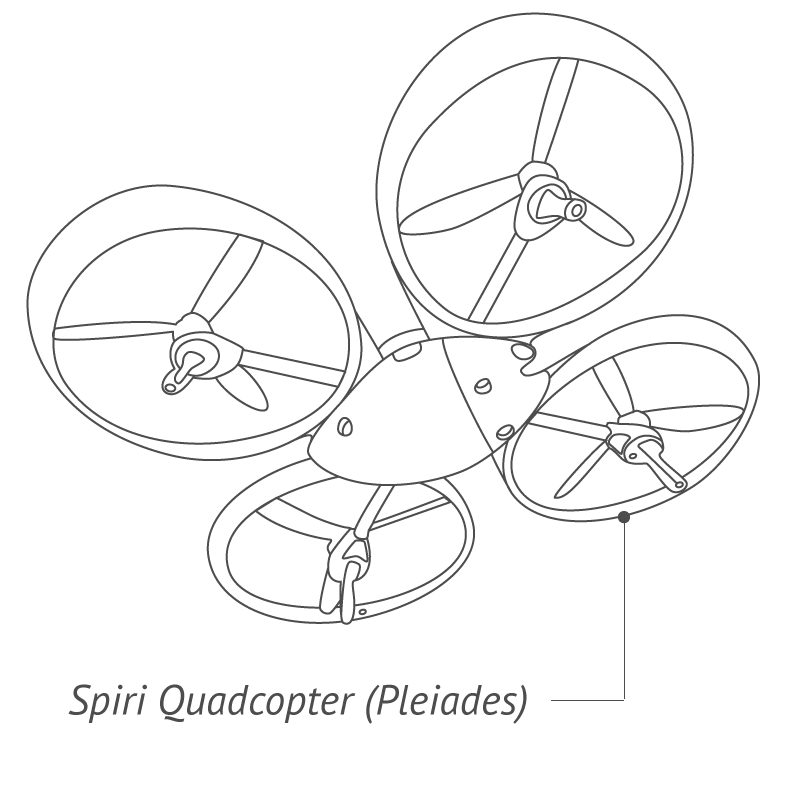
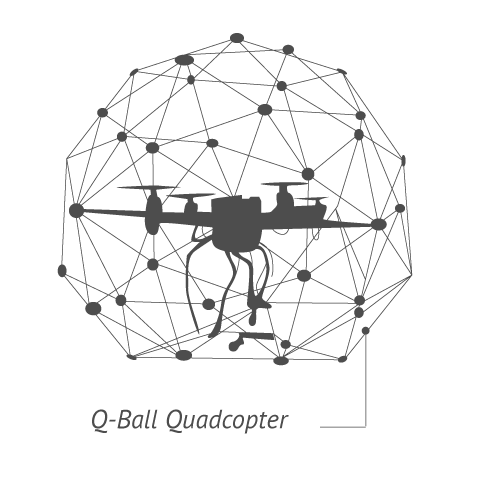
The McGill Aerospace Mechatronics Laboratory is dedicated to supporting research themes revolving around aeronautical and space systems, more specifically, Unmanned Aerial Vehicles (UAVs) and Space Robotic systems. The group’s research goals are to increase the autonomy of these systems for a range of applications. In the context of UAVs, we are working towards increasing the autonomy of small multi-rotor vehicles for landing and take-off maneuvers, autonomous collision recovery control, and, of fixed-wing slow moving aircraft for acrobatic flying. Research with large indoor helium blimps related to control and docking of multiple blimps for artistic applications is also being pursued. A range of problems are being addressed including dynamics modeling and controller design, state estimation, localization and mapping, motion planning and parameter identification. In the context of Space Robotics, the current thrust of the research is related to Active Space Debris removal. We are investigating dynamics modelling and control algorithms for robotic debris removal as well as the use of tethered nets for debris capture. Work is also ongoing on space debris attitude and orbital propagation taking into account environmental uncertainties.
The laboratory houses several UAVs, including blimps, an omnidirectional ground vehicle, a Vicon motion capture system, a range of sensors, instrumentation and small-scale test-rigs and provides space for limited experiments with UAVs and debris capture strategies.
Go To The AML Youtube Channel
The AML Flickr page